|
|
| Quick Links | |
|
PCMMC : Perception-Driven Coordinated Multi-Robot Motion Control Project
|
|
| With support from | |
|
|


Vehicle control, navigation and application processing is performed in the onboard computer. This is a low power single board computer running a Linux based operating system with real-time properties.

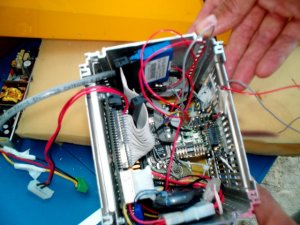

Various onboard CPU and avionics implementations
Servo control can be issued either from the CPU in autonomous flight mode or by a standard radio control in remote piloting.
An ethernet wireless modem with external antenna is used for communication with ground station. This link provides telemetry, mission configuration and control and the vision data transmitted when appropriate (for ex. upon onboard detection of relevant events).
A CAN bus is used to connect navigation sensors and power control to the main CPU and vision sensors connect through USB link.
An electric propulsion system was chosen keeping in mind, higher control capabilities, and safety operation in fire sensitive areas. With additional advantages in terms of ecological pollution an noise reduction. During the development phase a low cost , open avionics solution is being tested in RC airplane models along with the design of a custom airframe allowing extended operational range and duration.
 Various navigation sensors are integrated in order to provide vehicle position and orientation infromation.
Various navigation sensors are integrated in order to provide vehicle position and orientation infromation.
A low cost , small size (35x35x35 mm) inertial navigation system prototype was built with tri-axial accelerometer and rate gyro measurements. This system integrates also measurements from pressure based sensors (altimeter and pitot). A RISC ARM microcontroller performs low level sensor interface and filtering and provides flexibility in the information output and connection with other sensors.
A multi GPS onboard system was designed to determine vehicle attitude accurate estimates along with position.
The low cost GPS RTK solution under development provides not only absolute positioning information but also vehicle attitude determination. This system can be tightly integrated with the inertial subsystem providing a complete navigation solution for mobile vehicles.
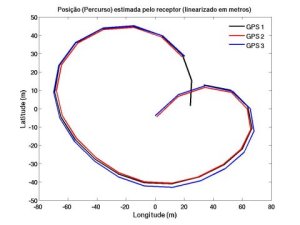
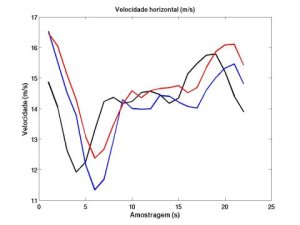
Some flight test GPS data
 The FALCOS aerial robots perform image processing on-board according with the mission sepcifications. This endows the system with a gerater decision autonomy and reduces necessary communications bandwidth for various mission applications. The low-power real-time vision system (LSAvision) developed for mobile robotics applications is used on the autonomous aerial vehicles for event dectection (such as fire) and relative position measurements. The implemented vision architecture has low computational cost, low latency, low power, highly modularity, configurability, adaptability, and scalability.
The FALCOS aerial robots perform image processing on-board according with the mission sepcifications. This endows the system with a gerater decision autonomy and reduces necessary communications bandwidth for various mission applications. The low-power real-time vision system (LSAvision) developed for mobile robotics applications is used on the autonomous aerial vehicles for event dectection (such as fire) and relative position measurements. The implemented vision architecture has low computational cost, low latency, low power, highly modularity, configurability, adaptability, and scalability.
This vision system can be used in different apprications ranging from security fo fire detection. In fire detection tasks the visual information is provided by low cost vision sensors, namely one in the visible spectrum and one in the near infrared one. Both can be either low cost digital cameras or dedicated hardware vision sensors (like BoaVista system). The near infrared imagery is obtained with uncooled sensors and a combination of optical filters.
At the operating altitude ranges from 500m up to 2000m the vehicle is capable of ground resolution from 1m up to 4m (with standard FOV lens). The available resolution can provide 5x5m of fire detection ground resolution, in strips of 1x1km to 4x4km and resolutions from 0.5 m to 2m
A hierarchic control structure assumes at the lower level the existence of a vehicle stabilization layer. This performs basic flight stabilisation controlling roll, pitch and yaw and keeping desired velocities and altitude.
Control manoeuvres are organized on top of this layer providing adequate guidance and with successive degrees of abstraction. The discrete states in the manoeuvre hybrid automata can either be simple continuous control laws or other lower level manoeuvres.